મોડ્યુલેશન એ બિન-રેખીય વિદ્યુત પ્રક્રિયા છે જેમાં એક સિગ્નલ (વાહક) ના પરિમાણો બીજા સિગ્નલ (મોડ્યુલેટિંગ, માહિતી) નો ઉપયોગ કરીને બદલવામાં આવે છે. સંચાર તકનીકમાં, આવર્તન, કંપનવિસ્તાર અને તબક્કા મોડ્યુલેશનનો વ્યાપકપણે ઉપયોગ થાય છે. પાવર ઇલેક્ટ્રોનિક્સ અને માઇક્રોપ્રોસેસર તકનીકમાં, પલ્સ-પહોળાઈ મોડ્યુલેશન વ્યાપક બન્યું છે.
સામગ્રી
PWM (પલ્સ પહોળાઈ મોડ્યુલેશન) શું છે
મૂળ સિગ્નલના પલ્સ-પહોળાઈ મોડ્યુલેશન સાથે, મૂળ સિગ્નલનું કંપનવિસ્તાર, આવર્તન અને તબક્કો યથાવત રહે છે. લંબચોરસ પલ્સની અવધિ (પહોળાઈ) માહિતી સિગ્નલની ક્રિયા હેઠળ બદલાઈ શકે છે. અંગ્રેજી તકનીકી સાહિત્યમાં, તેને PWM - પલ્સ-પહોળાઈ મોડ્યુલેશન તરીકે સંક્ષિપ્ત કરવામાં આવે છે.
PWM કેવી રીતે કામ કરે છે
પલ્સ પહોળાઈ મોડ્યુલેટેડ સિગ્નલ બે રીતે રચાય છે:
- એનાલોગ;
- ડિજિટલ
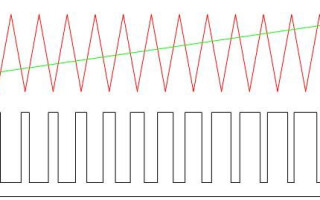
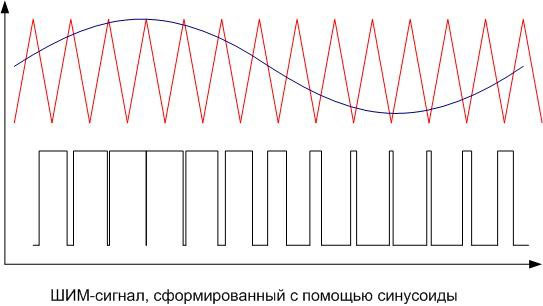
PWM સિગ્નલ બનાવવાની એનાલોગ પદ્ધતિ સાથે, લાકડાંઈ નો વહેર અથવા ત્રિકોણાકાર સિગ્નલના રૂપમાં વાહકને ઇન્વર્ટિંગને ખવડાવવામાં આવે છે. તુલનાત્મક ઇનપુટ, અને માહિતી - બિન-ઈનવર્ટિંગ પર. જો તાત્કાલિક વાહક સ્તર મોડ્યુલેટીંગ સિગ્નલ કરતા વધારે હોય, તો તુલનાકારનું આઉટપુટ શૂન્ય છે, જો ઓછું હોય તો - એક. આઉટપુટ એ વાહક ત્રિકોણ અથવા આરાની આવર્તનને અનુરૂપ આવર્તન સાથેનો એક અલગ સિગ્નલ છે અને મોડ્યુલેટીંગ વોલ્ટેજના સ્તરના પ્રમાણમાં પલ્સ લંબાઈ છે.
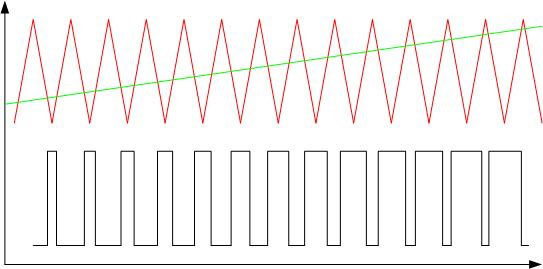
ઉદાહરણ તરીકે, ત્રિકોણાકાર સિગ્નલનું પલ્સ પહોળાઈ મોડ્યુલેશન રેખીય રીતે વધી રહ્યું છે. આઉટપુટ કઠોળની અવધિ આઉટપુટ સિગ્નલના સ્તરના પ્રમાણસર છે.
એનાલોગ પીડબલ્યુએમ નિયંત્રકો તૈયાર માઈક્રોસિર્કિટના રૂપમાં પણ ઉપલબ્ધ છે, જેની અંદર કમ્પેરેટર અને કેરિયર જનરેશન સર્કિટ સ્થાપિત છે. બાહ્ય આવર્તન-સેટિંગ તત્વોને કનેક્ટ કરવા અને માહિતી સિગ્નલ પૂરા પાડવા માટે ઇનપુટ્સ છે. આઉટપુટમાંથી સિગ્નલ દૂર કરવામાં આવે છે જે શક્તિશાળી વિદેશી કીને નિયંત્રિત કરે છે. પ્રતિસાદ માટે ઇનપુટ્સ પણ છે - તે સેટ નિયંત્રણ પરિમાણોને જાળવવા માટે જરૂરી છે. જેમ કે, ઉદાહરણ તરીકે, TL494 ચિપ છે. એવા કિસ્સાઓ માટે કે જ્યાં ગ્રાહકની શક્તિ પ્રમાણમાં ઓછી હોય, બિલ્ટ-ઇન કી સાથે PWM નિયંત્રકો ઉપલબ્ધ છે. LM2596 માઇક્રોસર્ક્યુટની આંતરિક કી 3 એમ્પીયર સુધીના વર્તમાન માટે ડિઝાઇન કરવામાં આવી છે.
ડિજિટલ પદ્ધતિ વિશિષ્ટ માઇક્રોસિર્કિટ અથવા માઇક્રોપ્રોસેસરનો ઉપયોગ કરીને હાથ ધરવામાં આવે છે. પલ્સ લંબાઈ આંતરિક પ્રોગ્રામ દ્વારા નિયંત્રિત થાય છે. લોકપ્રિય PIC અને AVR સહિત ઘણા માઇક્રોકન્ટ્રોલર્સમાં PWM "ઓન બોર્ડ" ના હાર્ડવેર અમલીકરણ માટે બિલ્ટ-ઇન મોડ્યુલ હોય છે, PWM સિગ્નલ પ્રાપ્ત કરવા માટે, તમારે મોડ્યુલને સક્રિય કરવાની અને તેના ઓપરેશન પરિમાણો સેટ કરવાની જરૂર છે.જો આવા મોડ્યુલ ઉપલબ્ધ ન હોય, તો પછી PWM સંપૂર્ણપણે સોફ્ટવેર દ્વારા ગોઠવી શકાય છે, આ મુશ્કેલ નથી. આ પદ્ધતિ આઉટપુટના લવચીક ઉપયોગ દ્વારા વધુ શક્તિ અને સ્વતંત્રતા આપે છે, પરંતુ વધુ નિયંત્રક સંસાધનોનો ઉપયોગ કરે છે.
PWM સિગ્નલની લાક્ષણિકતાઓ
PWM સિગ્નલની મહત્વની લાક્ષણિકતાઓ છે:
- કંપનવિસ્તાર (યુ);
- આવર્તન (f);
- ફરજ ચક્ર (S) અથવા ફરજ ચક્ર D.
લોડના આધારે વોલ્ટમાં કંપનવિસ્તાર સેટ કરવામાં આવે છે. તેણે ઉપભોક્તાનું રેટ કરેલ સપ્લાય વોલ્ટેજ પ્રદાન કરવું આવશ્યક છે.
પલ્સ પહોળાઈ દ્વારા મોડ્યુલેટેડ સિગ્નલની આવર્તન નીચેના વિચારણાઓમાંથી પસંદ કરવામાં આવે છે:
- ઉચ્ચ આવર્તન, ઉચ્ચ નિયંત્રણ ચોકસાઈ.
- આવર્તન PWM દ્વારા નિયંત્રિત ઉપકરણના પ્રતિસાદ સમય કરતાં ઓછી હોવી જોઈએ નહીં, અન્યથા નિયંત્રિત પરિમાણની નોંધનીય લહેરો થશે.
- આવર્તન જેટલી વધારે છે, સ્વિચિંગ નુકસાન વધારે છે. તે એ હકીકત પરથી ઉદભવે છે કે કીનો સ્વિચિંગ સમય મર્યાદિત છે. લૉક કરેલ સ્થિતિમાં, તમામ સપ્લાય વોલ્ટેજ કી તત્વ પર ડ્રોપ થાય છે, પરંતુ ત્યાં લગભગ કોઈ વર્તમાન નથી. ખુલ્લી સ્થિતિમાં, સંપૂર્ણ લોડ પ્રવાહ કીમાંથી વહે છે, પરંતુ વોલ્ટેજ ડ્રોપ નાનો છે, કારણ કે થ્રુપુટ પ્રતિકાર થોડા ઓહ્મ છે. બંને કિસ્સાઓમાં, પાવર ડિસીપેશન નજીવું છે. એક રાજ્યમાંથી બીજા રાજ્યમાં સંક્રમણ ઝડપથી થાય છે, પરંતુ તરત જ નહીં. અનલૉક-લૉકિંગની પ્રક્રિયામાં, આંશિક રીતે ખુલ્લા તત્વ પર મોટો વોલ્ટેજ ઘટે છે અને તે જ સમયે તેમાંથી નોંધપાત્ર પ્રવાહ વહે છે. આ સમયે, વિખરાયેલી શક્તિ ઉચ્ચ મૂલ્યો સુધી પહોંચે છે. આ સમયગાળો ટૂંકો છે, કી પાસે નોંધપાત્ર રીતે ગરમ થવાનો સમય નથી.પરંતુ સમયના એકમ દીઠ આવા સમય અંતરાલોની આવૃત્તિમાં વધારો સાથે, તે વધુ બને છે, અને ગરમીનું નુકસાન વધે છે. તેથી, કીઓ બનાવવા માટે, ઝડપી તત્વોનો ઉપયોગ કરવો મહત્વપૂર્ણ છે.
- જ્યારે ડ્રાઇવિંગ ઇલેક્ટ્રિક મોટર આવર્તન વ્યક્તિને સાંભળી શકાય તેવા વિસ્તારમાંથી દૂર કરવી જોઈએ - 25 kHz અને તેથી વધુ. કારણ કે ઓછી PWM આવર્તન પર, એક અપ્રિય વ્હિસલ થાય છે.
આ જરૂરિયાતો ઘણીવાર એકબીજા સાથે સંઘર્ષમાં હોય છે, તેથી કેટલાક કિસ્સાઓમાં આવર્તનની પસંદગી એ સમાધાન છે.
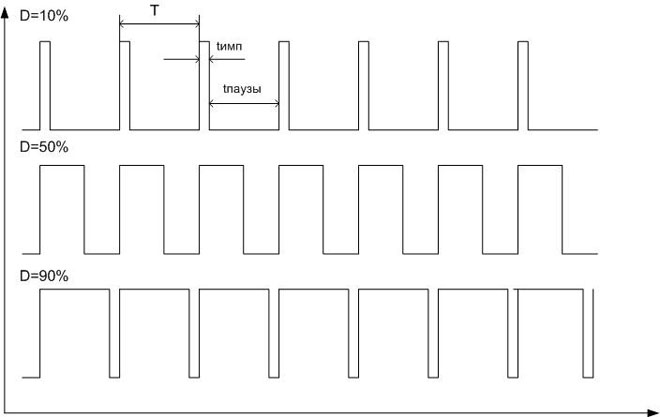
મોડ્યુલેશન મૂલ્ય ફરજ ચક્રને દર્શાવે છે. નાડી પુનરાવર્તિત દર સ્થિર હોવાથી, સમયગાળાની અવધિ પણ સ્થિર છે (T=1/f). અવધિમાં આવેગ અને વિરામનો સમાવેશ થાય છે, જેની અવધિ અનુક્રમે, ટીimp અને ટીવિરામ, અને ટીimp+tવિરામ=T. ફરજ ચક્ર એ પલ્સ અવધિ અને સમયગાળાનો ગુણોત્તર છે - S \u003d timp/ટી. પરંતુ વ્યવહારમાં તે પારસ્પરિક મૂલ્યનો ઉપયોગ કરવા માટે વધુ અનુકૂળ હોવાનું બહાર આવ્યું - ભરણ પરિબળ: D=1/S=T/timp. ટકાવારી તરીકે ભરણ પરિબળને વ્યક્ત કરવું વધુ અનુકૂળ છે.
PWM અને SIR વચ્ચે શું તફાવત છે
વિદેશી તકનીકી સાહિત્યમાં પલ્સ-પહોળાઈ મોડ્યુલેશન અને પલ્સ-પહોળાઈ નિયમન (PWR) વચ્ચે કોઈ તફાવત નથી. રશિયન નિષ્ણાતો આ ખ્યાલો વચ્ચે તફાવત કરવાનો પ્રયાસ કરી રહ્યા છે. વાસ્તવમાં, PWM એ મોડ્યુલેશનનો એક પ્રકાર છે, એટલે કે, બીજાના પ્રભાવ હેઠળ કેરિયર સિગ્નલમાં ફેરફાર, એક મોડ્યુલેશન. વાહક સંકેત માહિતીના વાહક તરીકે કાર્ય કરે છે, અને મોડ્યુલેટીંગ સિગ્નલ આ માહિતીને સેટ કરે છે. અને પલ્સ-પહોળાઈનું નિયમન એ PWM નો ઉપયોગ કરીને લોડ મોડનું નિયમન છે.
PWM ના કારણો અને એપ્લિકેશનો
પલ્સ પહોળાઈ મોડ્યુલેશનના સિદ્ધાંતનો ઉપયોગ થાય છે શક્તિશાળી અસુમેળ મોટર્સના સ્પીડ કંટ્રોલર્સ. આ કિસ્સામાં, એડજસ્ટેબલ ફ્રીક્વન્સી મોડ્યુલેટીંગ સિગ્નલ (સિંગલ-ફેઝ અથવા થ્રી-ફેઝ) ઓછા-પાવર સાઈન વેવ જનરેટર દ્વારા જનરેટ થાય છે અને એનાલોગ રીતે વાહક પર સુપરઇમ્પોઝ કરવામાં આવે છે. આઉટપુટ એ PWM સિગ્નલ છે, જે જરૂરી પાવરની ચાવીઓને ખવડાવવામાં આવે છે. પછી તમે લો-પાસ ફિલ્ટર દ્વારા કઠોળના પરિણામી ક્રમને પસાર કરી શકો છો, ઉદાહરણ તરીકે, સરળ આરસી સર્કિટ દ્વારા, અને મૂળ સાઇનસૉઇડ પસંદ કરો. અથવા તમે તેના વિના કરી શકો છો - એન્જિનની જડતાને કારણે શુદ્ધિકરણ કુદરતી રીતે થશે. દેખીતી રીતે, વાહકની આવર્તન જેટલી વધારે છે, આઉટપુટ વેવફોર્મ મૂળ સાઇનસૉઇડની નજીક છે.
એક કુદરતી પ્રશ્ન ઊભો થાય છે - શા માટે જનરેટરના સિગ્નલને તરત જ વિસ્તૃત કરવું અશક્ય છે, ઉદાહરણ તરીકે, શક્તિશાળી ટ્રાન્ઝિસ્ટરનો ઉપયોગ કરીને? કારણ કે રેખીય મોડમાં કાર્યરત નિયમનકારી તત્વ લોડ અને કી વચ્ચે પાવરનું પુનઃવિતરણ કરશે. આ કિસ્સામાં, મુખ્ય તત્વ પર નોંધપાત્ર શક્તિનો વ્યય થાય છે. જો કોઈ શક્તિશાળી નિયંત્રણ તત્વ કી મોડ (ટ્રિનિસ્ટર, ટ્રાયક, આરજીબીટી ટ્રાંઝિસ્ટર) માં કાર્ય કરે છે, તો સમય જતાં પાવર વિતરિત થાય છે. નુકસાન ઘણું ઓછું હશે, અને કાર્યક્ષમતા ઘણી વધારે હશે.
ડિજિટલ ટેક્નોલોજીમાં, પલ્સ-વિડ્થ રેગ્યુલેશન માટે કોઈ ખાસ વિકલ્પ નથી. સિગ્નલ કંપનવિસ્તાર ત્યાં સતત છે, વોલ્ટેજ અને પ્રવાહ ફક્ત પલ્સ પહોળાઈ સાથે વાહકને મોડ્યુલેટ કરીને અને ત્યારબાદ તેની સરેરાશ કરીને બદલી શકાય છે. તેથી, PWM નો ઉપયોગ તે પદાર્થો પર વોલ્ટેજ અને વર્તમાનને નિયંત્રિત કરવા માટે થાય છે જે પલ્સ સિગ્નલને સરેરાશ કરી શકે છે. સરેરાશ વિવિધ રીતે થાય છે:
- લોડ જડતાને કારણે.આમ, થર્મોઇલેક્ટ્રિક હીટર અને અગ્નિથી પ્રકાશિત દીવાઓની થર્મલ જડતા કઠોળ વચ્ચેના વિરામમાં નિયંત્રિત વસ્તુઓને નોંધપાત્ર રીતે ઠંડુ થવા દે છે.
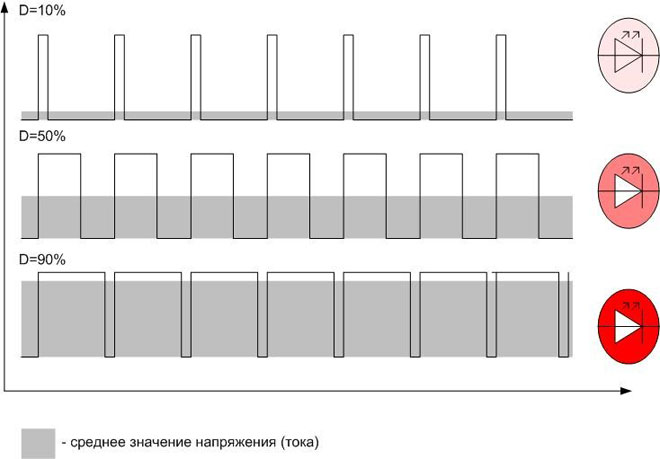
- દ્રષ્ટિની જડતાને કારણે. એલઇડી પાસે પલ્સમાંથી પલ્સ સુધી જવાનો સમય છે, પરંતુ માનવ આંખ આની નોંધ લેતી નથી અને તેને વિવિધ તીવ્રતા સાથે સતત ગ્લો તરીકે સમજે છે. આ સિદ્ધાંતનો ઉપયોગ એલઇડી મોનિટરના બિંદુઓની તેજસ્વીતાને નિયંત્રિત કરવા માટે થાય છે. પરંતુ કેટલાક સો હર્ટ્ઝની આવર્તન સાથે અગોચર ઝબકવું હજી પણ હાજર છે અને આંખના થાકનું કારણ બને છે.
- યાંત્રિક જડતાને કારણે. આ ગુણધર્મનો ઉપયોગ બ્રશ કરેલ ડીસી મોટર્સના નિયંત્રણમાં થાય છે. નિયમનની યોગ્ય રીતે પસંદ કરેલી આવર્તન સાથે, મોટર પાસે મૃત વિરામમાં ધીમું થવાનો સમય નથી.
તેથી, PWM નો ઉપયોગ થાય છે જ્યાં વોલ્ટેજ અથવા વર્તમાનનું સરેરાશ મૂલ્ય નિર્ણાયક ભૂમિકા ભજવે છે. ઉલ્લેખિત સામાન્ય કિસ્સાઓ ઉપરાંત, PWM પદ્ધતિ વેલ્ડીંગ મશીનો અને બેટરી ચાર્જર વગેરેમાં સરેરાશ પ્રવાહને નિયંત્રિત કરે છે.
જો કુદરતી સરેરાશ શક્ય ન હોય, તો ઘણા કિસ્સાઓમાં આ ભૂમિકા પહેલેથી જ ઉલ્લેખિત લો-પાસ ફિલ્ટર દ્વારા લેવામાં આવી શકે છે (એલપીએફ) આરસી સાંકળના સ્વરૂપમાં. વ્યવહારુ હેતુઓ માટે, આ પૂરતું છે, પરંતુ તે સમજવું આવશ્યક છે કે વિકૃતિ વિના લો-પાસ ફિલ્ટરનો ઉપયોગ કરીને પીડબ્લ્યુએમમાંથી મૂળ સિગ્નલને અલગ કરવું અશક્ય છે. છેવટે, PWM સ્પેક્ટ્રમમાં અસંખ્ય હાર્મોનિક્સનો સમાવેશ થાય છે જે અનિવાર્યપણે ફિલ્ટરના પાસબેન્ડમાં આવશે. તેથી, કોઈએ પુનઃનિર્માણ કરેલ સાઇનસૉઇડના આકાર વિશે ભ્રમ ન કરવો જોઈએ.
ખૂબ જ કાર્યક્ષમ અને અસરકારક PWM RGB LED નિયંત્રણ. આ ઉપકરણમાં ત્રણ p-n જંકશન છે - લાલ, વાદળી, લીલો.દરેક ચેનલની ગ્લોની તેજને અલગથી બદલીને, તમે LED ગ્લોનો લગભગ કોઈપણ રંગ મેળવી શકો છો (શુદ્ધ સફેદના અપવાદ સાથે). PWM સાથે લાઇટિંગ ઇફેક્ટ્સ બનાવવાની શક્યતાઓ અનંત છે.
પલ્સ પહોળાઈ મોડ્યુલેટેડ ડિજિટલ સિગ્નલનો સૌથી સામાન્ય ઉપયોગ એ લોડમાંથી વહેતા સરેરાશ વર્તમાન અથવા વોલ્ટેજને નિયંત્રિત કરવાનો છે. પરંતુ આ પ્રકારના મોડ્યુલેશનનો બિન-માનક ઉપયોગ પણ શક્ય છે. તે બધા વિકાસકર્તાની કલ્પના પર આધાર રાખે છે.
સમાન લેખો: