સામાન્ય અર્થમાં સેન્સર એ એક ઉપકરણ છે જે એક ભૌતિક જથ્થાને બીજામાં રૂપાંતરિત કરે છે, પ્રક્રિયા કરવા, ટ્રાન્સમિશન અથવા અનુગામી રૂપાંતરણ માટે અનુકૂળ છે. નિયમ પ્રમાણે, પ્રથમ જથ્થો ભૌતિક છે, જે સીધા માપન (તાપમાન, ઝડપ, વિસ્થાપન, વગેરે) માટે યોગ્ય નથી, અને બીજો વિદ્યુત અથવા ઓપ્ટિકલ સિગ્નલ છે. માપવાના સાધનોના ક્ષેત્રમાં એક વિશિષ્ટ સ્થાન સેન્સર્સ દ્વારા કબજે કરવામાં આવ્યું છે, જેનું મુખ્ય તત્વ ઇન્ડક્ટર છે.
સામગ્રી
ઇન્ડક્ટન્સ સેન્સર કેવી રીતે કાર્ય કરે છે અને તે કેવી રીતે કાર્ય કરે છે
ઓપરેશનના સિદ્ધાંત અનુસાર, પ્રેરક સેન્સર સક્રિય છે, એટલે કે, તેમને કામ કરવા માટે બાહ્ય જનરેટરની જરૂર છે. તે ઇન્ડક્ટરને આપેલ આવર્તન અને કંપનવિસ્તાર સાથે સિગ્નલ પ્રદાન કરે છે.
કોઇલના વળાંકોમાંથી પસાર થતો પ્રવાહ ચુંબકીય ક્ષેત્ર બનાવે છે. જો વાહક પદાર્થ ચુંબકીય ક્ષેત્રમાં પ્રવેશે છે, તો કોઇલના પરિમાણો બદલાય છે.તે ફક્ત આ ફેરફારને ઠીક કરવા માટે જ રહે છે.
સરળ બિન-સંપર્ક સેન્સર વિન્ડિંગના નજીકના ઝોનમાં ધાતુના પદાર્થોના દેખાવ પર પ્રતિક્રિયા આપે છે. આ કોઇલના અવબાધમાં ફેરફાર કરે છે, આ ફેરફારને ઇલેક્ટ્રિકલ સિગ્નલમાં રૂપાંતરિત કરવું આવશ્યક છે, એમ્પ્લીફાય કરવું અને (અથવા) તુલનાત્મક સર્કિટનો ઉપયોગ કરીને થ્રેશોલ્ડના પેસેજને ઠીક કરવો.
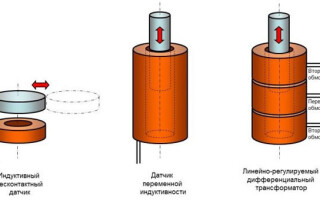
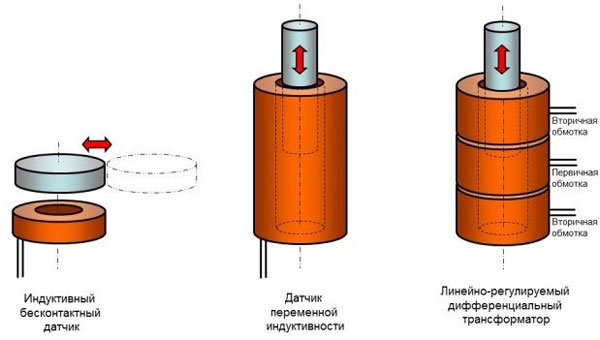
અન્ય પ્રકારના સેન્સર કોઇલના કોર તરીકે સેવા આપતા ઑબ્જેક્ટની રેખાંશ સ્થિતિમાં ફેરફારોને પ્રતિસાદ આપે છે. જ્યારે ઑબ્જેક્ટની સ્થિતિ બદલાય છે, ત્યારે તે કોઇલની અંદર અથવા બહાર ખસે છે, જેનાથી તેનું ઇન્ડક્ટન્સ બદલાય છે. આ ફેરફારને વિદ્યુત સંકેતમાં રૂપાંતરિત કરીને માપી શકાય છે. આવા સેન્સરનું બીજું સંસ્કરણ છે જ્યારે કોઈ પદાર્થ બહારથી કોઇલની નજીક આવે છે. આ જમીનની અસરને કારણે ઇન્ડક્ટન્સમાં ઘટાડો થવાનું કારણ બને છે.
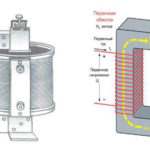
ઇન્ડક્ટિવ ડિસ્પ્લેસમેન્ટ સેન્સરનું બીજું વર્ઝન લીનિયરલી એડજસ્ટેબલ ડિફરન્સિયલ ટ્રાન્સફોર્મર (LVDT) છે. તે એક સંયુક્ત કોઇલ છે, જે નીચેના ક્રમમાં બનાવવામાં આવે છે:
- ગૌણ વિન્ડિંગ 1;
- પ્રાથમિક વિન્ડિંગ;
- ગૌણ વિન્ડિંગ 2.
જનરેટરમાંથી સિગ્નલ પ્રાથમિક વિન્ડિંગને આપવામાં આવે છે. મધ્યમ કોઇલ દ્વારા બનાવેલ ચુંબકીય ક્ષેત્ર દરેક ગૌણમાં EMF પ્રેરિત કરે છે (ટ્રાન્સફોર્મર સિદ્ધાંત). કોર, જ્યારે તે ફરે છે, ત્યારે કોઇલ વચ્ચેના પરસ્પર જોડાણમાં ફેરફાર કરે છે, દરેક વિન્ડિંગ્સમાં ઇલેક્ટ્રોમોટિવ બળને બદલીને. આ ફેરફાર માપન સર્કિટ દ્વારા સુધારી શકાય છે. કોરની લંબાઈ સંયુક્ત કોઇલની કુલ લંબાઈ કરતાં ઓછી હોવાથી, ગૌણ વિન્ડિંગ્સમાં EMF ગુણોત્તર દ્વારા ઑબ્જેક્ટની સ્થિતિ અસ્પષ્ટપણે નક્કી કરી શકાય છે.
સમાન સિદ્ધાંત પર - વિન્ડિંગ્સ વચ્ચેના પ્રેરક જોડાણમાં ફેરફાર - ટર્ન સેન્સર બનાવવામાં આવે છે.તે બે કોક્સિયલ કોઇલ ધરાવે છે. સિગ્નલ વિન્ડિંગ્સમાંથી એક પર લાગુ થાય છે, બીજામાં EMF પરિભ્રમણના પરસ્પર કોણ પર આધારિત છે.
ઓપરેશનના સિદ્ધાંતથી, તે સ્પષ્ટ છે કે પ્રેરક સેન્સર, ડિઝાઇનને ધ્યાનમાં લીધા વિના, બિન-સંપર્ક છે. તેઓ અંતરે કામ કરે છે, અને નિયંત્રિત ઑબ્જેક્ટ સાથે સીધા સંપર્કની જરૂર નથી.
ઇન્ડક્ટિવ સેન્સરના ફાયદા અને ગેરફાયદા
ઇન્ડક્ટિવ પ્રકારના સેન્સરના ફાયદાઓમાં મુખ્યત્વે શામેલ છે:
- ડિઝાઇન વિશ્વસનીયતા;
- સંપર્ક જોડાણોનો અભાવ;
- ઉચ્ચ આઉટપુટ પાવર, જે અવાજના પ્રભાવને ઘટાડે છે અને નિયંત્રણ સર્કિટને સરળ બનાવે છે;
- ઉચ્ચ સંવેદનશીલતા;
- ઔદ્યોગિક આવર્તનના વૈકલ્પિક વોલ્ટેજના સ્ત્રોતોમાંથી કામ કરવાની ક્ષમતા.
ઇન્ડક્ટિવ પ્રકારના સેન્સર્સનો મુખ્ય ગેરલાભ એ તેમનું કદ, વજન અને ઉત્પાદન જટિલતા છે. આપેલ પરિમાણો સાથે વિન્ડિંગ કોઇલ માટે, ખાસ સાધનોની જરૂર છે. ઉપરાંત, માસ્ટર ઓસિલેટરમાંથી સિગ્નલના કંપનવિસ્તારને ચોક્કસ રીતે જાળવવાની જરૂરિયાતને બાદબાકી ગણવામાં આવે છે. જ્યારે તે બદલાય છે, ત્યારે સંવેદનશીલતાનો વિસ્તાર પણ બદલાય છે. સેન્સર ફક્ત વૈકલ્પિક પ્રવાહ પર કાર્ય કરે છે, તેથી કંપનવિસ્તાર જાળવવું એ ચોક્કસ તકનીકી સમસ્યા બની જાય છે. સીધા (અથવા સ્ટેપ-ડાઉન ટ્રાન્સફોર્મર દ્વારા) સેન્સરને ઘરગથ્થુ અથવા ઔદ્યોગિક નેટવર્ક સાથે કનેક્ટ કરવું શક્ય બનશે નહીં - તેમાં, કંપનવિસ્તાર અથવા આવર્તનમાં વોલ્ટેજની વધઘટ સામાન્ય સ્થિતિમાં 10% સુધી પણ પહોંચી શકે છે, જે માપનની ચોકસાઈને અસ્વીકાર્ય બનાવે છે. .
ઉપરાંત, માપનની ચોકસાઈ આનાથી પ્રભાવિત થઈ શકે છે:
- તૃતીય-પક્ષ ચુંબકીય ક્ષેત્રો (સેન્સરનું રક્ષણ તેના ઓપરેશનના સિદ્ધાંતના આધારે અશક્ય છે);
- પુરવઠા અને માપન કેબલ્સમાં તૃતીય-પક્ષ EMF પિકઅપ્સ;
- ઉત્પાદન ભૂલો;
- સેન્સર લાક્ષણિકતા ભૂલ;
- સેન્સર ઇન્સ્ટોલેશન સાઇટ પર બેકલેશ અથવા વિકૃતિઓ કે જે એકંદર કામગીરીને અસર કરતી નથી;
- તાપમાન પર ચોકસાઈની અવલંબન (વિન્ડિંગ વાયરના પરિમાણો, તેના પ્રતિકાર સહિત) બદલાય છે.
તેમના ચુંબકીય ક્ષેત્રમાં ડાઇલેક્ટ્રિક પદાર્થોના દેખાવને પ્રતિસાદ આપવા માટે ઇન્ડક્ટન્સ સેન્સરની અસમર્થતા ફાયદા અને ગેરફાયદા બંનેને આભારી હોઈ શકે છે. એક તરફ, આ તેમની અરજીના અવકાશને મર્યાદિત કરે છે. બીજી બાજુ, તે મોનિટર કરાયેલ વસ્તુઓ પર ગંદકી, ગ્રીસ, રેતી વગેરેની હાજરી પ્રત્યે સંવેદનશીલ બનાવે છે.
ઇન્ડક્ટિવ સેન્સર્સના સંચાલનમાં ખામીઓ અને સંભવિત મર્યાદાઓનું જ્ઞાન તેમના ફાયદાઓનો તર્કસંગત ઉપયોગ કરવાની મંજૂરી આપે છે.
ઇન્ડક્ટિવ સેન્સર્સનો અવકાશ
ઇન્ડક્ટિવ પ્રોક્સિમિટી સેન્સર્સનો ઉપયોગ ઘણીવાર લિમિટ સ્વીચ તરીકે થાય છે. આવા ઉપકરણો વ્યાપક બન્યા છે:
- સુરક્ષા પ્રણાલીઓમાં, બારીઓ અને દરવાજાઓને અનધિકૃત રીતે ખોલવા માટેના સેન્સર તરીકે;
- ટેલિમિકેનિક્સ સિસ્ટમ્સમાં, એકમો અને મિકેનિઝમ્સની અંતિમ સ્થિતિના સેન્સર તરીકે;
- રોજિંદા જીવનમાં દરવાજા, શટરની બંધ સ્થિતિ સૂચવવા માટેની યોજનાઓમાં;
- વસ્તુઓની ગણતરી માટે (ઉદાહરણ તરીકે, કન્વેયર બેલ્ટ સાથે આગળ વધવું);
- ગિયર્સના પરિભ્રમણની ગતિ નક્કી કરવા માટે (દરેક દાંત, સેન્સર દ્વારા પસાર થાય છે, આવેગ બનાવે છે);
- અન્ય પરિસ્થિતિઓમાં.

એંગલ એન્કોડરનો ઉપયોગ શાફ્ટ, ગિયર્સ અને અન્ય ફરતા ઘટકો તેમજ સંપૂર્ણ એન્કોડર્સના પરિભ્રમણ ખૂણાને નિર્ધારિત કરવા માટે થઈ શકે છે. ઉપરાંત, આવા ઉપકરણોનો ઉપયોગ લીનિયર પોઝિશન સેન્સર સાથે મશીન ટૂલ્સ અને રોબોટિક ઉપકરણોમાં થઈ શકે છે. જ્યાં તમારે મિકેનિઝમ્સના નોડ્સની સ્થિતિ બરાબર જાણવાની જરૂર છે.
પ્રેરક સેન્સરના અમલીકરણના વ્યવહારુ ઉદાહરણો
વ્યવહારમાં, પ્રેરક સેન્સરની ડિઝાઇનને વિવિધ રીતે લાગુ કરી શકાય છે. સૌથી સરળ અમલ અને સમાવેશ એ બે-વાયર સિંગલ સેન્સર માટે છે, જે તેના સંવેદનશીલતા ઝોનમાં મેટલ ઑબ્જેક્ટ્સની હાજરીનું નિરીક્ષણ કરે છે. આવા ઉપકરણો ઘણીવાર ઇ-આકારના કોરના આધારે બનાવવામાં આવે છે, પરંતુ આ મૂળભૂત મુદ્દો નથી. આવા અમલીકરણનું ઉત્પાદન કરવું વધુ સરળ છે.
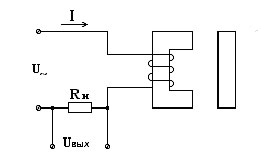
જ્યારે કોઇલનો પ્રતિકાર બદલાય છે, ત્યારે સર્કિટમાં વર્તમાન અને સમગ્ર લોડમાં વોલ્ટેજ ડ્રોપ બદલાય છે. આ ફેરફારો પ્રતિબદ્ધ થઈ શકે છે. સમસ્યા એ છે કે લોડ પ્રતિકાર જટિલ બની જાય છે. જો તે ખૂબ મોટું હોય, તો જ્યારે ધાતુની વસ્તુ દેખાય ત્યારે વર્તમાનમાં થતા ફેરફારો પ્રમાણમાં નાના હશે. આ સિસ્ટમની સંવેદનશીલતા અને અવાજ પ્રતિરક્ષા ઘટાડે છે. જો તે નાનું હોય, તો સર્કિટમાં વર્તમાન મોટો હશે, વધુ પ્રતિરોધક સેન્સરની જરૂર પડશે.
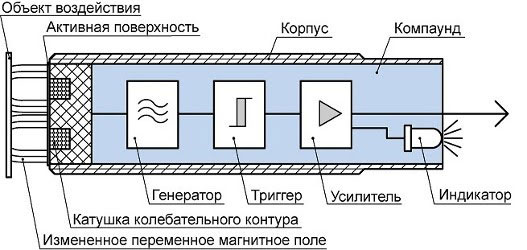
તેથી, ત્યાં ડિઝાઇન છે જેમાં માપન સર્કિટ સેન્સર હાઉસિંગમાં બનાવવામાં આવે છે. જનરેટર કઠોળ પેદા કરે છે જે ઇન્ડક્ટરને ખવડાવે છે. જ્યારે કોઈ ચોક્કસ સ્તર પર પહોંચી જાય છે, ત્યારે ટ્રિગર ચાલુ થાય છે, સ્થિતિ 0 થી 1 અથવા તેનાથી વિપરીત ફ્લિપિંગ થાય છે. બફર એમ્પ્લીફાયર પાવર અને (અથવા) વોલ્ટેજની દ્રષ્ટિએ સિગ્નલને એમ્પ્લીફાય કરે છે, LEDને લાઇટ કરે છે (ઓલવે છે) અને બાહ્ય સર્કિટમાં એક અલગ સિગ્નલ આઉટપુટ કરે છે.
આઉટપુટ સિગ્નલ બનાવી શકાય છે:
- ઇલેક્ટ્રોમેગ્નેટિક દ્વારા અથવા સોલિડ સ્ટેટ રિલે - શૂન્ય અથવા એક વોલ્ટેજ સ્તર;
- "શુષ્ક સંપર્ક" ઇલેક્ટ્રોમેગ્નેટિક રિલે;
- ઓપન કલેક્ટર ટ્રાન્ઝિસ્ટર (સંરચના n-p-n અથવા p-n-p).
આ કિસ્સામાં, સેન્સરને કનેક્ટ કરવા માટે ત્રણ વાયર જરૂરી છે:
- ખોરાક
- સામાન્ય વાયર (0 વોલ્ટ);
- સિગ્નલ વાયર.
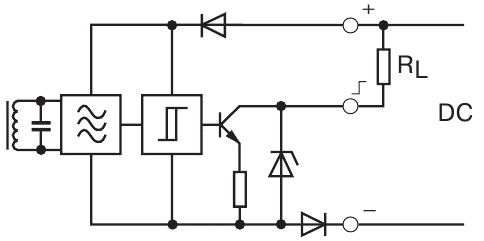
આવા સેન્સર ડીસી વોલ્ટેજ દ્વારા પણ સંચાલિત થઈ શકે છે. ઇન્ડક્ટન્સ માટે કઠોળ તેઓ આંતરિક જનરેટર દ્વારા રચાય છે.
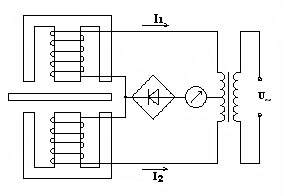
ડિફરન્શિયલ એન્કોડરનો ઉપયોગ પોઝિશન મોનિટરિંગ માટે થાય છે. જો નિયંત્રિત ઑબ્જેક્ટ બંને કોઇલના સંદર્ભમાં સપ્રમાણતા ધરાવે છે, તો તેમના દ્વારા પ્રવાહ સમાન છે. જ્યારે કોઈપણ વિન્ડિંગને ક્ષેત્ર તરફ ખસેડવામાં આવે છે, ત્યારે અસંતુલન થાય છે, કુલ પ્રવાહ શૂન્યની બરાબર થવાનું બંધ કરે છે, જે સ્કેલની મધ્યમાં તીર સાથે સૂચક દ્વારા રેકોર્ડ કરી શકાય છે. સૂચકનો ઉપયોગ શિફ્ટની તીવ્રતા અને તેની દિશા બંને નક્કી કરવા માટે થઈ શકે છે. પોઇન્ટર ડિવાઇસને બદલે, તમે કંટ્રોલ સ્કીમનો ઉપયોગ કરી શકો છો, જે સ્થિતિમાં ફેરફાર વિશેની માહિતી પ્રાપ્ત કર્યા પછી, સિગ્નલ જારી કરશે, ઑબ્જેક્ટને સંરેખિત કરવા માટે પગલાં લેશે, તકનીકી પ્રક્રિયામાં ગોઠવણો કરશે, વગેરે.

લીનિયરલી એડજસ્ટેબલ ડિફરન્સિયલ ટ્રાન્સફોર્મર્સના સિદ્ધાંત અનુસાર બનેલા સેન્સર સંપૂર્ણ સ્ટ્રક્ચરના સ્વરૂપમાં બનાવવામાં આવે છે, જે પ્રાથમિક અને ગૌણ વિન્ડિંગ્સ સાથેની ફ્રેમ અને અંદર ફરતી લાકડી છે (તે વસંત-લોડ થઈ શકે છે). જનરેટરમાંથી સિગ્નલ મોકલવા અને સેકન્ડરી વિન્ડિંગ્સમાંથી EMF દૂર કરવા માટે વાયર બહાર લાવવામાં આવે છે. નિયંત્રિત ઑબ્જેક્ટને સળિયા સાથે યાંત્રિક રીતે જોડી શકાય છે. તે ડાઇલેક્ટ્રિકથી પણ બનાવી શકાય છે - માપન માટે માત્ર સ્ટેમની સ્થિતિ મહત્વપૂર્ણ છે.
કેટલીક સહજ ખામીઓ હોવા છતાં, પ્રેરક સેન્સર અવકાશમાં પદાર્થોની બિન-સંપર્ક શોધ સાથે સંકળાયેલા ઘણા ક્ષેત્રોને બંધ કરે છે.ટેક્નોલોજીના સતત વિકાસ છતાં, આ પ્રકારનું ઉપકરણ નજીકના ભવિષ્યમાં ઉપકરણોને માપવા માટેનું બજાર છોડશે નહીં, કારણ કે તેનું સંચાલન ભૌતિકશાસ્ત્રના મૂળભૂત નિયમો પર આધારિત છે.
સમાન લેખો: